LinMot Talk 操作介面初始設定
1.畫面介紹

2.初始精靈設定:Start Motor Wizard


2.2 Extension Cable Setup: 延伸cable 設定,請依LinMot 實際cable型號設定








2.初始精靈設定:Start Motor Wizard
2.1 Actuator Selection: 請依LinMot 實際型號設定
*.Slider 安裝方向 : Regular(一般安裝) :如下圖所示
Reversed(反向安裝) : Notch在另一側

2.2 Extension Cable Setup: 延伸cable 設定,請依LinMot 實際cable型號設定

2.3 Extension Position Sensor System : 如有使用到以下功能,才需要設定
* 外接光學尺 *Encoder
模擬輸出(部分機型具備)
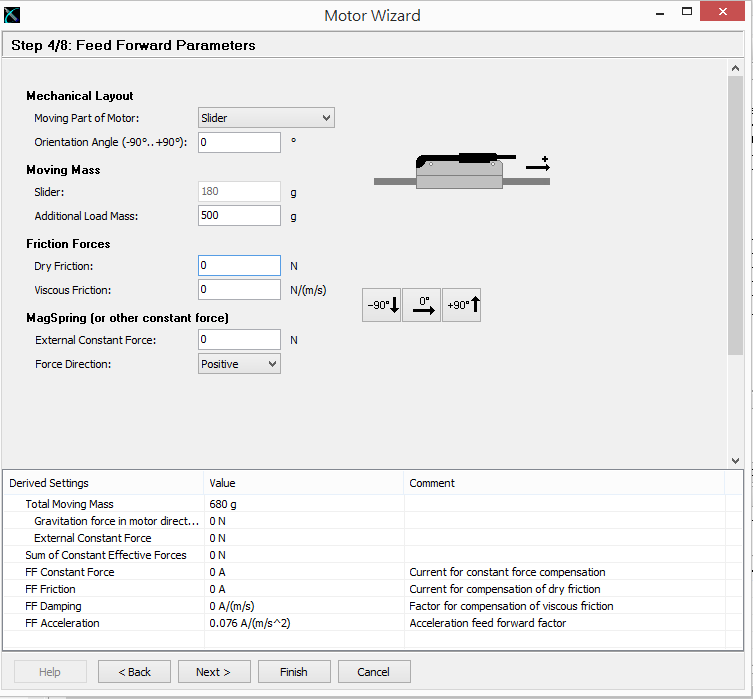
2.4 Feed Forward Parameters :
*機械安裝參數 : Slider:磁棒移動 Stator:線圈(管子)移動 Angle:安裝角度
*移動質量 : Slider:系統會自行設定 Additional Load Mass : 輸入負載質量
*摩擦力 : 依實際應用例設定
*磁力配重設定 : 依實際應用例設定
2.5 PID
Position Controller : 內建有Soft 及 Stiff(剛性強),供參考,一般採原廠建議值

2.6 Homing I :設定回Home方式:請依實際應用例設定

2.7 Homing II :設定Home位置時, 磁棒和線圈(管子)的相對距離,系統即可知道有效行程的範圍
*.可利用servo off時,手動移動磁棒至home極限處,後量測磁棒邊緣及線圈(管子)的距離

2.8 Homing III:設定Home完成後的相對距離
◎.Home Position(HP) :
Home位置相對最終停留位置的距離
例:設定-10mm,表示home點碰到時,磁棒會向前移10mm後停止
◎.Initial Position(IP) : 當上一步驟停止後,向移動多少,設為初始位置
例:設定0mm,則靜止點為初始位置,設10mm,會再往前移動10mm,設為初始點
◎.設定完成後,按下Finish即完成設定
3. 其他設定 (參數調整)
※ Home點動作完出現Error : 電壓過低
解決方法: 調整Homing 的Current Limit 為60-70%
